
Радиолокационные Станции впервые появились на самолётах во время Второй Мировой войны — как правило ими оснащались специализированные ночные двухмоторные истребители-перехватчики, хотя некоторые одномоторные истребители также несли примитивные радары. С течением времени авиация постоянно развивалась, и РЛС постепенно становилась неотъемлемым атрибутом практически любого самолёта. Изначально использовавшаяся только как средство обнаружения, технология РЛС претерпела множество изменений, а развитие ракетного вооружения позволило использовать станцию ещё и в наступательной роли для наведения ракет с полуактивной ГСН. И на сегодняшний день невозможно представить себе истребитель, не имеющий на борту этого ключевого элемента бортового оборудования.

В игре РЛС были добавлены в игру в обновлении 1.87 «Цель захвачена». Если самолёт оснащен радаром, то в левой части экрана отображается радарная сетка, а в верхней части компас, отображающий курс и направление найденного самолёта.
В игре есть три основных типа бортовых радаров:
- РЛС поиска цели
- РЛС сопровождения цели
- Импульсно-доплеровская РЛС
РЛС поиска целей будут обнаруживать воздушные суда (как дружественные, так и вражеские) и отображать их в виде «мигания» на дисплее радара, а также отображать треугольник на компасе, показывающий, в каком направлении двигается обнаруженный самолёт. РЛС сопровождения целей являются более продвинутыми, они позволяют игроку «захватить» цель. Как только самолёт будет захвачен, вокруг него появятся данные, показывающие расстояние до цели и скорость сближения между самолётом игрока и целью. А самые продвинутые, импульсно-допплеровские РЛС практически не подвержены помехам с земли и позволяют осуществлять сопровождение цели даже на её фоне. Кроме того, многие самолёты 7 ранга и выше имеют радиолокационный ответчик в составе БРЭО, который работает в паре с РЛС и позволяет осуществлять моментальную идентификацию «свой-чужой».
- Общие принципы РЛС
- Типы РЛС
- Советы по использованию РЛС и ракет с ПАРГСН
- Аббревиатуры различных режимов работы РЛС
Общие принципы РЛС
Пользовательский интерфейс
Основные принципы
Самолёты, оснащённые радарами, имеют радарную сетку слева и компас (см. изображение справа). Для того чтобы включить радар самолёта, необходимо назначить кнопку «Включение/выключение поиска РЛС» (находится под заголовком «Вооружение» в меню управления самолётом). По умолчанию это комбинация Ctrl + R. После включения радара над дисплеем радара появится знак молнии.
Типы отображения

По умолчанию используется индикация в виде полукруга. Когда радар включён, линия, устанавливающая текущий угол сканирования, перемещается влево и вправо в радиальном направлении относительно центральной точки. Для определения расстояния до обнаруженных целей используется последовательность из четырёх полукругов дальности, а последовательность линий (под углом 15 градусов) указывают направление, в котором находятся обнаруженные цели. Если радар имеет угол сканирования по азимуту менее чем на 180 градусов, то дисплей по-прежнему полукруг, однако с каждой стороны имеется сплошная полоса, указывающая максимальную и минимальную область сканирования.
Альтернативным является отображение в виде квадрата. Изменить тип дисплея можно в разделе настроек → «Самолётные боевые настройки» → «Использовать прямоугольный индикатор РЛС». Это квадратный дисплей, обеспечивающий двухмерное представление пространства «сверху вниз», вертикальная ось отображает расстояние до цели, а горизонтальная ось представляет азимут (угол) цели. Максимальный и минимальный углы сканирования по азимуту отображаются в верхних углах дисплея. Последовательность из четырех полос дальности используется для определения расстояния до цели, а вертикальные линии используются для определения направления цели.
Шкала дальности РЛС
Некоторые РЛС позволяют изменять дальность обнаружения. Чтобы изменить шкалу дальности, необходимо назначить кнопку «Смена масштаба экрана РЛС» (расположен под заголовком «Вооружение» в меню управления самолетом).Текущий выбранный масштаб дальности отображается на дисплее радара. Стоит отметить, что шкала дальности по умолчанию может быть меньше максимальной дальности обнаружения радара, так что потребуется увеличить шкалу дальности, чтобы в полной мере использовать РЛС.
Режим поиска РЛС
Некоторые РЛС имеют несколько режимов поиска. Режим поиска по умолчанию обычно использует всю область сканирования. Преимущество в том, что обнаружения целей происходит в широком диапазоне. Недостаток в том, что сканирование занимает больше времени (так как радар должен сканировать большую область), это означает, что цели обновляются реже на дисплее. Некоторые РЛС позволяют оператору изменять режим поиска так, что радар сканирует только меньшую область, соответственно цели будут обновляться на радаре чаще, но в узком азимуте перед самолётом игрока. Эта способность в первую очередь полезна для отслеживания быстро движущихся или маневрирующих целей, где более медленное время сканирования затруднит отслеживание движения такой цели. Когда режим радара изменяется, единственная разница на дисплее состоит в том, что широкая линия сканирования не доходит до краев дисплея РЛС (так как теперь она сканирует меньшую область). Чтобы изменить режим сканирования радара, необходимо назначить клавишу «Смена режима обзора РЛС» (находится под заголовком «Вооружение» в меню управления самолетом).
Базовый принцип работы
При включении РЛС будет сканировать пирамиду или конусообразную область перед самолетом игрока (показано на рисунке справа). Радары могут обнаруживать только цели, которые попадают в зону их сканирования, размер и форма которых варьируются в зависимости от модели радара. Каждый радар имеет максимальный и минимальный угол сканирования по азимуту, максимальный и минимальный угол сканирования по вертикальной оси. Радары также имеют минимальную дальность обнаружения (обычно 150–300 м), ближе которой цели не будут обнаружены.
Как и в случае с другими характеристиками, максимальная дальность обнаружения сильно различается между радарами (от 4 км до 40 км). Но на максимальной дальности цели не гарантируется точное обнаружения. Дальность, на которой обнаруживается цель, будет зависеть от того площади поперечного сечения цели. Например, AI Mk. X (установлен на Sea Venom FAW 20) может обнаружить большой бомбардировщик G5N1 на максимальной дальности обнаружения 14 км, однако гораздо меньший He 162 A-1 он может обнаружить примерно на 9–9,5 км. Радары также имеют заданный диапазон гарантированного обнаружения цели любого размера (в зависимости от модели радара), при условии, что цель находится в пределах области сканирования.
Осторожно! Вы можете захватить союзный самолёт.
Когда РЛС обнаруживает цель, на дисплее появляется точка. Ее положение не будет обновлено до тех пор, пока радар не обнаружит цель снова. Когда цель повторно обнаруживается, ее старая вспышка удаляется, а новая отображается в месте нового обнаружения.
Типы РЛС
Два основных типа РЛС — это РЛС поиска цели и РЛС сопровождения цели. РЛС поиска цели можно найти на низких рангах, однако РЛС сопровождения только на высоких. При чем на последних рангах оба радара работают одновременно.
РЛС поиска цели
РЛС поиска цели или поисковые радары не имеют возможности сопровождать цель и просто отображают обнаруженные цели на дисплее и на компасе. Основная работа радаров обнаружения цели была обсуждена ранее в этой статье. Радары обнаружения цели доступны с первого ранга, РЛС на более высоких рангами имеют гораздо лучшие характеристики (большая область сканирования, лучшая дальность, частота обновления и т.д.).
РЛС сопровождения цели
РЛС сопровождения устанавливаются на некоторых самолетах в дополнение (не вместо) к РЛС поиска. Они, как правило, имеют малую дальность по сравнению с поисковым радаром самолета, однако они способны отслеживать и «привязываться» к целям. Сопровождающие РЛС, как правило, имеют меньше области сканирования, чем поисковый радар. Его область сканирования отображается как более темная область на дисплее радара (как видно на изображении справа).
Чтобы захватить цель, необходимо назначить клавишу «Захват цели РЛС» (расположен под заголовком «Вооружение» в меню управления самолетом). По умолчанию это Ctrl + F, но гораздо удобнее установить на кнопку «Выбор цели» (по умолчанию Х или СКМ). Цель может быть захвачена только в том случае, если она находится в пределах максимальной дальности РЛС радаров и зоны захвата (темная часть радара). Как только цель будет заблокирована, вокруг нее появится зеленый квадрат, а также вокруг ее значка на дисплее радара и компасе (чтобы отличить заблокированную цель от других). Точное расстояние до цели будет отображаться рядом с рамкой вокруг нее. Также показывается точная скорость сближения (скорость будет считаться отрицательной, если цель удаляется от РЛС).
Постоянно сканирующие радары
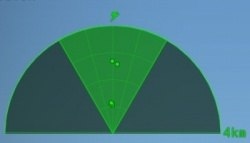
Немецкое семейство радаров Lichtenstein (радары, найденные на немецких самолетах WW2) уникально по сравнению с другими радарами в том, что они не сканируют цели. Вместо этого они постоянно излучают конус радиоволн и обнаруживают возвращенный сигнал. Это дает им преимущество постоянного обновления радара (вместо обновления только тогда, когда линия сканирования обнаруживает цель). Однако, как компромисс, эти радары имеют плохую дальность действия (всего 4 или 5 км) и узкую область сканирования. Когда эти радары активны, радиолокационные сигналы постоянно обновляют данные о местонахождении цели. Пример этого можно увидеть на изображении справа.
Импульсно-доплеровские радары
Впервые подобные системы начали устанавливать на истребителях в 1960-х годах. Обычные радары имели критический недостаток: обнаружение целей было невозможным, если антенна радара была направлена ниже линии горизонта — в таком случае отражение от земли просто «ослепляло» РЛС. Внедрение импульсно-доплеровской технологии позволило компенсировать этот эффект.

Импульсно-доплеровские системы измеряют дальность до объектов, измеряя время, прошедшее между отправкой импульса энергии радиолуча и получением отражения объекта. Радиоволны распространяются со скоростью света, поэтому расстояние до объекта — это замер времени прохождения сигнала, умноженный на скорость света, разделённый на два (туда и обратно). Если упрощённо: ИД-радар выявляет изменения в частоте отражённого импульса, возникающие от движущихся объектов. Таким образом ИД-радар и распознаёт летательные аппараты на фоне статичной земли и других находящихся на ней неподвижных объектов, которые у обычных радаров при полёте у земли или при направлении антенны ниже горизонта создавали бы одни помехи. Из этого вытекает и главный недостаток ИД-радара: его неспособность обнаруживать цели, летящие перпендикулярным курсом к источнику облучения — разница в частоте волн будет ниже порога обнаружения, и радар будет определять их как статичные объекты.
Оптико-локационная станция
Оптико-локационная станция (ОЛС) предназначена для поиска теплоконтрастных целей и выдачи целеуказания ракетам с тепловыми головками самонаведения. В её состав входит датчик инфракрасных волн, который фиксирует направление излучения, генерируемого работающими двигателями самолёта противника, а также лазерный дальномер, который измеряет расстояние до цели. Говоря упрощённо — это большая ИК ГСН, осуществляющая поиск целей не радиоволнами, а по инфракрасному излучению. В игре, тем не менее, эта система работает в паре с РЛС и выполняет, по сути, те же функции — обнаружение целей и наведение ракет. Разумеется, ОЛС работает в пассивном режиме, что означает, что работа ОЛС остаётся незамеченной бортовыми системами вражеской авиации, однако дальность работы ОЛС существенно ниже, чем у РЛС. ОЛС устанавливаются в основном на советские самолёты (МиГ-23, МиГ-29), но также присутствует на некоторых самолётах западной школы авиастроения.
Советы по использованию РЛС и ракет с ПАРГСН
Радары с функцией сопровождения цели
Прежде всего стоит помнить о том, что такие радары эффективны в первую очередь на начальном этапе боя, когда самолёты стремятся занять высоту. Для атаки с использованием ракет с полуактивной ГСН нет никакого смысла пытаться занять доминирующую высоту — захватывать цели придётся с опусканием носа самолёта ниже уровня горизонта, а это чревато тем, что при резком снижении высоты радар может перегрузиться от слишком большого «шума» от земли и потерять цель, следовательно ракета не достигнет цели. Наиболее оптимальным решением будет занять позицию под противником, дав ему примерно километр преимущества по высоте. В таком случае радару, находящемуся выше горизонта, ничто не помешает быстро захватить цель и точно поразить её ракетой.
Радары с импульсно-доплеровской системой
Самолёты, имеющие в своём распоряжении ИД-радар, могут пользоваться сразу как обычным, так и ИД-радаром. Это значительно расширяет их тактические возможности на поле боя, так как для них открывается более широкий простор для применения ракет с ПАРГСН. Радар в ИД-режиме позволяет использовать радиолокационные ракеты как на малой высоте, так и в случае, когда нос самолёта опущен ниже линии горизонта. Однако стоит учитывать, что цель должна идти либо прямо на источник облучения, либо с отклонением не более чем в 45 градусов. Если цель выйдет за эту границу, радар перестанет воспринимать цель как движущийся объект и пущенная ракета потеряет захват. Тот же эффект возникнет, если попытаться захватить цель сзади при равной или почти равной скорости — разница частоты волн будет минимальной, поэтому радар не сможет увидеть цель, так что для эффективного применения ракеты «вдогонку» стоит быть либо значительно (хотя бы на 150 км/ч) быстрее цели, либо значительно медленнее. Поэтому наиболее эффективно использовать ИД-радар в сочетании с обычным режимом сопровождения, переключаясь между ними по необходимости.
В бою лучше всего держать РЛС включённой в стандартном режиме на этапе набора высоты, чтобы легче обнаруживать воздушные цели, а непосредственно перед атакой ракетой с ПАРГСН перевести РЛС в режим Ближнего Воздушного Боя (БВБ). Это можно сделать тремя способами: через многофункциональное меню, назначением отдельной клавиши (Управление — Вооружение — Дальний/ближний бой РЛС/ОЛС), либо просто выключив радар и включив захват цели через РЛС — любой из этих способов переведёт РЛС в режим БВБ. РЛС в данном режиме работы сканирует область в границах узкого луча перед самолётом, однако скорость и точность захвата значительно повышается.
Аббревиатуры различных режимов работы РЛС
- ПСК (поиск) — стандартный поисковый режим работы РЛС, наиболее подходящий для отслеживания и захвата целей, находящихся выше линии горизонта;
- ПСК ИД (поиск импульсно-доплеровский) — импульсно-допплеровский режим радара, который засекает движущиеся объекты на фоне статичного пространства, тем самым позволяя обнаруживать и захватывать цель даже на малой высоте, не опасаясь «ослепления» радара поверхностью земли;
- ПСК ИДС (поиск импульсно-доплеровский скоростной) — режим работы, фактически аналогичный ПСК ИД, за исключением того, что РЛС показывает не дальность до цели, а скорость сближения;
- СНП (сопровождение на проходе) — режим работы РЛС, в котором часть ресурсов станции расходуется на сопровождение одной выбранной цели, а остальное — на постоянное сканирование местности. Ведение цели в этом режиме даёт информацию о дистанции до противника, направлении движения и скорости сближения, а на экране радара для остальных контактов также будет доступна индикация направления их движения. Кроме того, «мягкий» захват в режиме СНП не вызывает срабатывание большинства СПО;
- СДЦ (селекция движущихся целей) — режим работы РЛС, в игре аналогичный ПСК ИД, за исключением того, что этот режим имеет ограничение по радиовысоте самолёта, после чего включается следующий режим работы;
- ВНЗ (вниз) — режим, включающийся при превышении радиовысоты на СДЦ, и по сути являющийся обычным режимом ПСК, но антенна РЛС при этом направлена вниз;
- СПР (сопровождение) — РЛС взяла цель на сопровождение;
- ЗХВ (захват) — РЛС производит захват цели;
- БВБ (ближний воздушный бой) — РЛС работает в режиме ближнего воздушного боя и захватывает любую попавшую под облучение цель, вне зависимости от системы «свой-чужой»;
- ППС (передняя полусфера) — означает то, что РЛС будет отлично видеть цели на встречных курсах, однако взять в захват цель, находясь позади неё, будет значительно сложнее.